 HOME
HOME
イノベーション・ジャパン2012
特殊環境下における自律搬送ロボット
発表者:金沢工業大学 情報工学科 中沢 実
技術の概要
近年,滅菌室や低高温室など人が入ることが困難な場所において,AGV(無人搬送車)を利用したいというニーズが広がっている.磁気テープを敷設して走行させる従来の手法は,事前の環境整備が必要な点や環境変化に柔軟に対応できない点があった.そこで本研究では,高温・低温・常温の室内間を,高精度,かつ,ロバストに,インフラを設置せずに自律搬送を行うロボットを実現することを最終目的とする.自律搬送を行うには,搬送車の自己位置と地図生成が必要であるが,運ばれた物が地図に影響し,自己位置推定,経路生成にも影響を及ぼす.AGVでは,荷物を自ら運び入れるため環境への影響は避けられず,さらに指定した荷物を運ぶ必要がある.
技術の特徴
本技術は,単なる自己位置推定と地図生成を行うことのみならず,AGVが運搬対象とする台車の認識を行なっている. 台車を認識するには,台車の車輪を検出することで行う.LRF(Laser Range Finder)で取得したデータから孤立した小領域群を抽出する.その後,抽出した小領域間の相対位置(距離,角度)から台車の車輪を検出する.
アピールポイント
本技術は,単なる自己位置推定と地図生成を行うことのみならず,AGVが運搬対象とする台車の認識を行なっている. 台車を認識するには,台車の車輪を検出することで行う.LRF(Laser Range Finder)で取得したデータから孤立した小領域群を抽出する.その後,抽出した小領域間の相対位置(距離,角度)から台車の車輪を検出する.
展示資料(注:ファイルサイズ: 10Mbyte)
 83C83m83x815B83V8387839381E83W838383p839391S94CA.pdf
83C83m83x815B83V8387839381E83W838383p839391S94CA.pdf
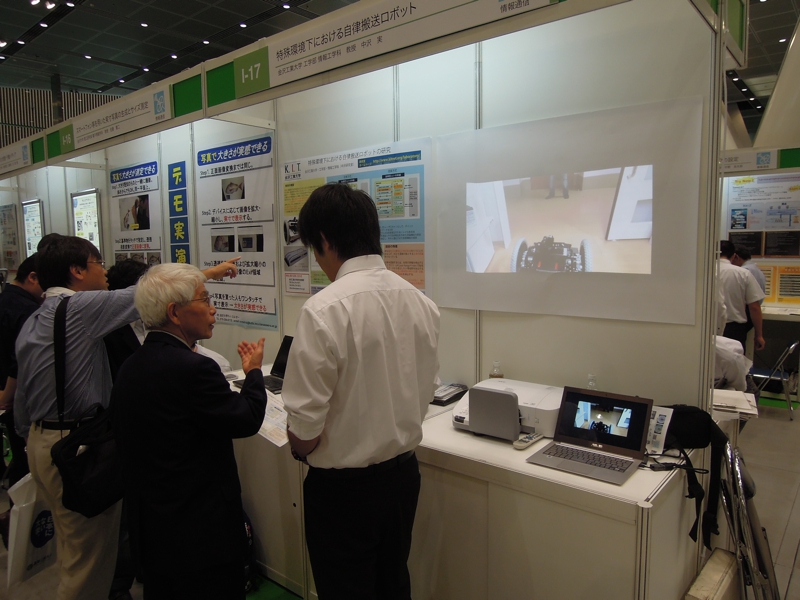
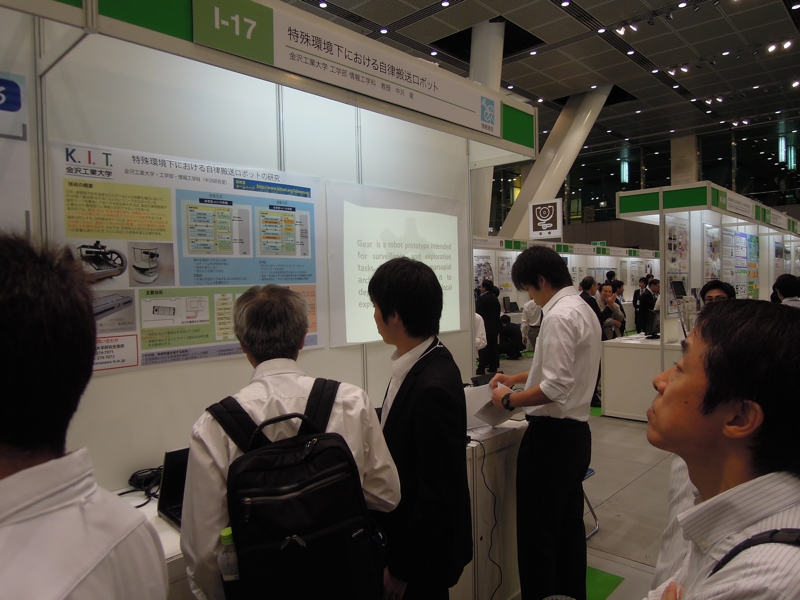
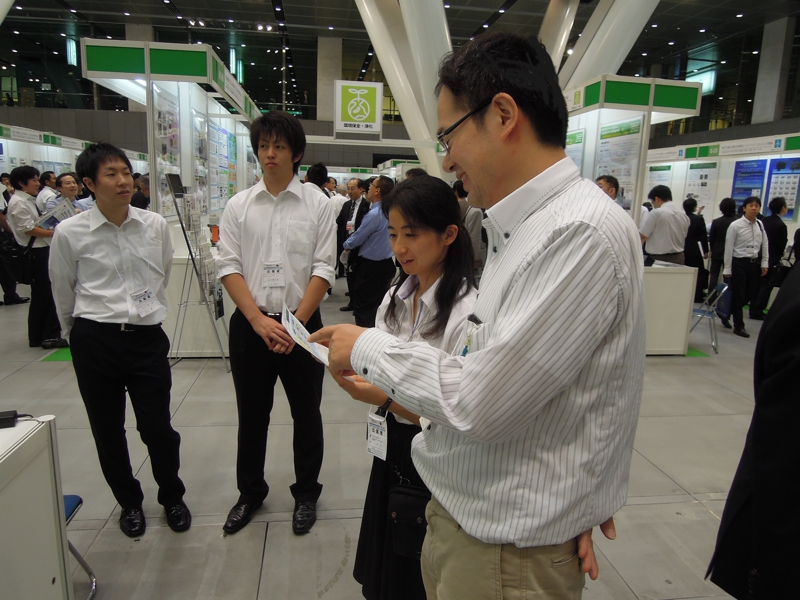
展示をおえて
二日間に渡る今回の展示は,いつものことながらロボットのトラブルが生じてしまい直前どころか,開場してからも調整が続くといった大変な状況ではあった.しかしながら,場所的に東京国際フォーラムということもあり,近くに大型の家電販売店があったおかげで修理部品を調達できたのは不幸中の幸いではあった.また,研究生4名(稲生君,鹿田君,平谷君.マルコ君)の展示に対して熱意を持って対応して頂いたおかげで周囲からの印象も良かったのではないかと思います.
今後も,このような展示については積極的に取り組んで行きたいと思います.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |