 HOME
HOME
平成26年度電気関係学会北陸支部連合大会
中沢研究室の大学院生4名が電気関係学会北陸支部連合大会にて発表を行いました.
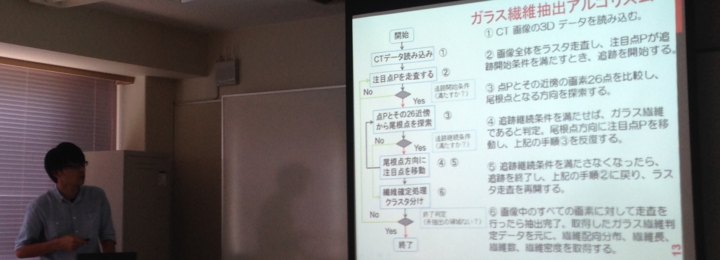
- タイトル:X線CTによる薄肉射出成形品のガラス繊維配向三次元画像解析
- 著者:櫻井壯達・中沢実
- 概要:近年の携帯電話や電子機器などの小型化には,プラスチック部品の小型化・薄型化が大きく貢献している.プラスチック部品を薄肉射出成形する際,成形品の高強度・高剛性・軽量化を目的にガラス繊維などの強化繊維を樹脂中に加える場合があるが,成形品の繊維配向によっては,そりやねじれといった成形不良が発生することがある.本研究では,そうした成形不良を事前に予測し,金型設計・製品設計に反映させることを目的に,X線CTによって撮影したプラスチック成形品の繊維配向状態を三次元的に解析する.不鮮明なCT画像であっても高精度にガラス繊維を抽出し,三次元配向および繊維長情報を把握できる方法を提案するとともに,その抽出精度を定量的に検証する.
- タイトル:大規模無線センサネットワークに向けたセンサノードの最適化
- 著者:平谷拓也・中沢実
- 概要:近年センサノードの自由度が高い可動ノードに対する研究が進められている.しかし,筆者らもノードに関する研究[3]を実施してきたが,根本的な問題解決に至る研究があまり進んでいないのが現状となっている.本研究では,大規模なWSNの実現を最終目標とし,センサモジュールの試作を行う.その後,デバイス性能や通信性能の評価結果からネットワークシミュレータを用いて仮想空間でのセンサノードの最適化を行う.本稿では,それらの実現手法及び現在までの研究成果を述べる.
- タイトル:脳波による遠隔操作ロボットの制御
- 著者:鷹箸孝典・中沢実
- 概要:福祉分野におけるヒトの脳活動の活用を現実世界で適用させることが我々の役割である.また,日常生活で車いすを利用する人へ安心できる生活を提供する助けの一つになることが本研究での最終目的である.我々は,初めて訪れる施設であっても脳波からユーザの意図を読み取り,車いすへコマンドを送ることで容易に目的地まで辿り着くシステムを実現するため,まず小規模なシステムの提案・構築を行う.本稿では,それらの構成を示す.
- タイトル:自律搬送車における経路設計に関する研究
- 著者:阿部拓真・中沢実
- 概要:これまでのAGVは,床にマーカーとして磁気テープを敷設するなど,大掛かりな事前工事が必要であり,柔軟な経路変更が行えなかった.また,グレーチングや金属製の床面で導入できない等の問題もあった.そこで本研究では,走行ガイドをなくし,走行環境に依存せずに自律走行する無人搬送車を実現することを最終目標としている.本稿ではAGVを自律走行させるため,環境地図生成と自己位置を推定する手法があるが,目的地まで走行するには環境地図上で経路を設計する必要がある.本稿ではより軽量な経路設計方法について解説する.